

0 引 言
對(duì)于柴油發(fā)電機(jī)組而言,調(diào)頻性能的好壞,是決定整個(gè)發(fā)電機(jī)組電氣性能的關(guān)鍵,決定了它的電壓特性、帶載能力。而傳統(tǒng)的模擬頻率調(diào)節(jié)裝置要實(shí)現(xiàn)復(fù)雜的控制規(guī)律或擴(kuò)展更多的功能,就必然造成結(jié)構(gòu)復(fù)雜,成本提高,可靠性降低的問(wèn)題。隨著微處理器技術(shù)和現(xiàn)代控制理論的發(fā)展,柴油發(fā)電機(jī)的頻率調(diào)節(jié)從傳統(tǒng)的模擬技術(shù)轉(zhuǎn)向數(shù)字控制。數(shù)字式控制器具有算法靈活、精度高、抗能力強(qiáng)等特點(diǎn),對(duì)數(shù)字式控制器的研究已成為柴油發(fā)電機(jī)領(lǐng)域的熱門(mén)課題。本文論述的就是柴油發(fā)電機(jī)數(shù)字控制器中頻率測(cè)量環(huán)節(jié)的功能實(shí)現(xiàn)。
1 測(cè)頻原理
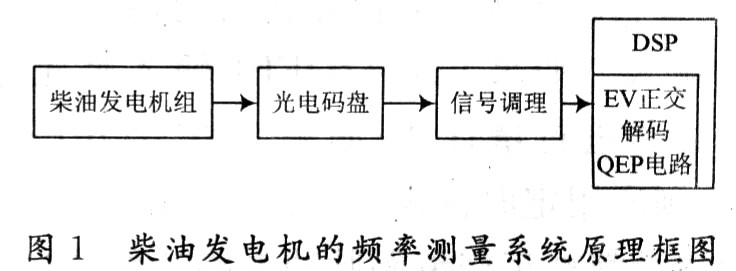
系統(tǒng)的原理框圖如圖l所示,柴油發(fā)電機(jī)的頻率可由光電編碼器來(lái)檢測(cè),碼盤(pán)與機(jī)組傳動(dòng)軸連接,能夠產(chǎn)生兩個(gè)頻率變化且正交(即相位相差90°)的脈沖,DSP通過(guò)其EV管理器的正交編碼脈沖QEP電路對(duì)脈沖頻率或周期進(jìn)行工字電感測(cè)量,從而測(cè)得機(jī)組轉(zhuǎn)速,機(jī)組轉(zhuǎn)速n與同步發(fā)繞行電感器電機(jī)發(fā)電頻率f之間滿足:
f=pn/60 (1)
其中p為發(fā)電機(jī)的極對(duì)數(shù)。故由此可間接測(cè)得柴油發(fā)電機(jī)的頻率。
而測(cè)取機(jī)組轉(zhuǎn)速的方法有T法、M法和M/T法,T法是通過(guò)測(cè)量光電碼盤(pán)所產(chǎn)生的相鄰兩個(gè)脈沖之間的時(shí)間來(lái)確定轉(zhuǎn)速,故適合測(cè)量較低轉(zhuǎn)速;M法則是在一定的時(shí)間間隔內(nèi)對(duì)光電碼盤(pán)所產(chǎn)生的脈沖進(jìn)行計(jì)數(shù)來(lái)確定轉(zhuǎn)速,故適合測(cè)量較高轉(zhuǎn)速;而M/T法由于結(jié)合了前兩者的特點(diǎn),所以在測(cè)速場(chǎng)合被廣泛使用。其原理是,由定時(shí)器確定采樣周期T,定時(shí)器的定時(shí)開(kāi)始時(shí)刻總與脈沖編碼器的第一個(gè)計(jì)數(shù)脈沖前沿保持一致,在T的期間內(nèi)得到脈沖數(shù)M1,同時(shí),另一個(gè)計(jì)數(shù)器對(duì)標(biāo)準(zhǔn)的時(shí)鐘脈沖進(jìn)行計(jì)數(shù),當(dāng)T定時(shí)結(jié)束時(shí),只停止對(duì)脈沖計(jì)數(shù)器的計(jì)數(shù),而T結(jié)束后脈沖編碼器輸出的第一個(gè)脈插件電感沖前沿時(shí),才停止對(duì)標(biāo)準(zhǔn)時(shí)鐘的計(jì)數(shù),并得到計(jì)數(shù)值M2,其持續(xù)時(shí)間為T(mén)+△T,即可以推導(dǎo)出此時(shí)轉(zhuǎn)速為:

其中K為編碼器旋轉(zhuǎn)一周的脈沖數(shù);fs為標(biāo)準(zhǔn)的時(shí)鐘脈沖的頻率。由式(1)可得,機(jī)組頻率為:
按此方共模電感法測(cè)頻,脈沖數(shù)M2會(huì)存在多1或少1的誤差,但由于fs遠(yuǎn)高于光電脈沖頻率,所以由其引起的誤差很小,測(cè)量精度大大提高。
2 測(cè)頻系統(tǒng)的實(shí)現(xiàn)
光電碼盤(pán)有A,B,Z三相輸出信號(hào),其中A和B相信號(hào)相位相差90°,Z相信號(hào)稱零位信號(hào)。因A和B相信號(hào)的電平超過(guò)DSP的輸入電平,故需先進(jìn)行信號(hào)調(diào)理,使其變?yōu)镺~3 V的電平信號(hào),測(cè)頻系統(tǒng)需要將A相調(diào)理信號(hào)接入DSP的EVA的CAPl/QEP1腳,將B相調(diào)理信號(hào)接入DSP的EVA的CAP2/QEP2腳即可。由于CAPl/QEPl,CAP2/QEP2為正交解碼電路與捕獲單元的復(fù)用腳,故需配置CAPCONA寄存器來(lái)使能正交解碼電路。
正交編碼脈沖電路的時(shí)基可由EVA的通用定時(shí)器T2提供,通用定時(shí)器必須設(shè)置成定向增/減計(jì)數(shù)模式,并以正交編碼脈沖時(shí)鐘源。機(jī)組的旋轉(zhuǎn)方向可通過(guò)檢測(cè)兩個(gè)脈沖序A、B那一個(gè)先到達(dá)來(lái)確定,轉(zhuǎn)速可由脈沖數(shù)和脈沖頻率來(lái)決定。EVA模塊中的正交編碼脈沖電路的方向檢測(cè)邏輯決定了兩個(gè)序列中哪一個(gè)是先導(dǎo)序列,接著它就產(chǎn)生方向信號(hào)作為通用定時(shí)器T2的計(jì)數(shù)方向輸入。如果CAPl/QEP1輸入是先導(dǎo)序列,則通用定時(shí)器進(jìn)行增計(jì)數(shù);如果CAP2/QEP2輸入是先導(dǎo)序列,則通用定時(shí)器進(jìn)行減計(jì)數(shù)。兩列正交輸入脈沖的兩個(gè)邊沿都被正交編碼脈沖電路計(jì)數(shù),因此產(chǎn)頻率是每個(gè)輸入序列的4倍,并把這個(gè)時(shí)鐘作為通用定時(shí)器T2的輸入。定時(shí)器T2在計(jì)數(shù)器上溢或下溢時(shí)翻轉(zhuǎn),并重新開(kāi)始計(jì)數(shù)。
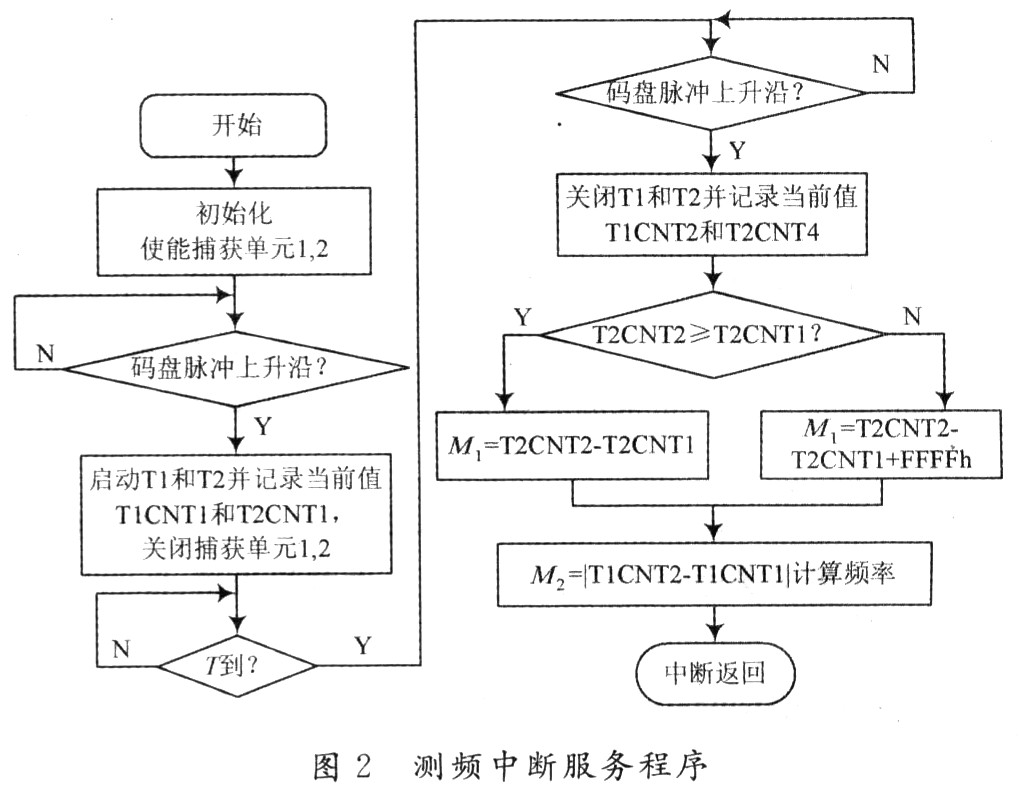
設(shè)置通用定時(shí)器T1的時(shí)鐘輸入為fs,并開(kāi)通定時(shí)器中斷,中斷周期為轉(zhuǎn)速的采樣周期T,則定時(shí)器每隔時(shí)間T向CPU發(fā)送一次中斷請(qǐng)求。利用光電碼盤(pán)輸出脈沖的上升沿啟動(dòng)采樣周期定時(shí)器工作功率電感的同時(shí),啟動(dòng)時(shí)鐘脈沖計(jì)數(shù)器工作。測(cè)頻中斷服務(wù)程序如圖2所示。
3 結(jié) 語(yǔ) 大功率電感廠家 |大電流電感工廠
