

去年十月份Toyota Lexus 的2007 年最新車款Lexus LS 460 和Lexus LS 460L 在美國(guó)市場(chǎng)上市,兩部車子都裝置了Toyota 最新發(fā)展的”高級(jí)停車導(dǎo)引系統(tǒng)(Advanced Parking Guidance System)”,這個(gè)系統(tǒng)是使用一個(gè)向后的攝像頭和停車聲納傳感器偵測(cè)周邊狀況,駕駛?cè)丝吭谝粋€(gè)停車位旁邊,按個(gè)按鈕,踩煞車以控制速度,系統(tǒng)便會(huì)自動(dòng)接手控制電動(dòng)動(dòng)力方向盤,完成路邊停車的動(dòng)作。除此之外,在目前最常應(yīng)用于工廠自動(dòng)化系統(tǒng)之中的自動(dòng)導(dǎo)引車輛(Automatic Guided Vehicle, AGV)系統(tǒng),可按照程序所下的命令及導(dǎo)引路線進(jìn)行、停止、轉(zhuǎn)彎,并能和搬運(yùn)系統(tǒng)作連結(jié);AGV是一種物料搬運(yùn)設(shè)備,能在固定位置自動(dòng)進(jìn)行貨物的裝載,并自動(dòng)行走到另一位置,以完成貨物的卸載的全自動(dòng)運(yùn)輸設(shè)備。AGV基本功能為能自動(dòng)依循固定的軌道行走,雖然說(shuō)這個(gè)技術(shù)早己引用在工廠中,但是由于路線必須是規(guī)劃好并在地上畫上行走路徑,并無(wú)法應(yīng)用于較復(fù)雜的環(huán)境之中,而我們所提出來(lái)的設(shè)計(jì),是利用圖像來(lái)辨別標(biāo)志,而標(biāo)志擺放位置也可以根據(jù)實(shí)際的應(yīng)用環(huán)境來(lái)做改變,所以應(yīng)用范圍較傳統(tǒng)AGV更為廣泛。
不僅如此,本設(shè)計(jì)也具有特定標(biāo)志搜尋功能,能夠自動(dòng)的分析現(xiàn)有的圖像信息,自動(dòng)鎖定目標(biāo)物并進(jìn)行自動(dòng)化車控的控制,故我們?cè)O(shè)計(jì)這套系統(tǒng)來(lái)協(xié)助民眾自動(dòng)停車、自動(dòng)倒車入庫(kù),也可應(yīng)用于機(jī)場(chǎng)對(duì)飛機(jī)的管控或是任何具有動(dòng)力的交通運(yùn)輸工具。本文將機(jī)械視覺(jué)算法以硬件加速的模塊實(shí)現(xiàn),結(jié)合多核的高效能的嵌入式處理器Nios,完成一個(gè)自動(dòng)化汽車導(dǎo)引的平臺(tái),未來(lái)可實(shí)現(xiàn)很多汽車駕駛安全方面的應(yīng)用,包括防撞、車道偏離警報(bào)和車道維持(可導(dǎo)引駕駛?cè)嘶氐皆嚨?、背面障礙物警報(bào)、行人監(jiān)測(cè)、車距監(jiān)測(cè)(讓駕駛?cè)撕颓败嚤3诌m當(dāng)?shù)木嚯x)、夜視、自動(dòng)頭燈調(diào)節(jié)、交通/限速標(biāo)志識(shí)別和盲點(diǎn)監(jiān)測(cè)等等。
設(shè)計(jì)介紹
我們使用“軟硬件共同設(shè)計(jì) (Co-design)方法”集成圖像輸入端、車控平臺(tái)及動(dòng)力控制模塊,完成自動(dòng)繞行電感器化目標(biāo)追蹤的實(shí)驗(yàn)平臺(tái),通過(guò)效能佳的軟核CPU來(lái)控制外圍的模塊,并利用VHDL自制圖像處理核心電路,建立智能型圖像追蹤的嵌入式系統(tǒng)平臺(tái),如圖1所示。
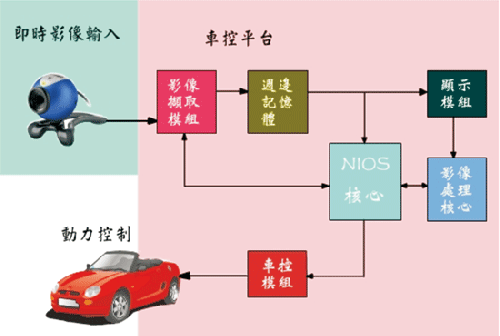
圖1 智能型圖像追蹤的嵌入式系統(tǒng)平臺(tái)
系統(tǒng)核心組成器件可分成以下三類:
1. CMOS 傳感器硬件模塊:CMOS 傳感控制器 、數(shù)據(jù)簡(jiǎn)化、SDRAM 控制器
(1) CMOS 傳感器控制器:驅(qū)動(dòng)CMOS 傳感器并進(jìn)行連續(xù)圖像擷取,將動(dòng)態(tài)圖像數(shù)據(jù)流傳入。
(2) 數(shù)據(jù)簡(jiǎn)化:將CMOS 傳感器擷取的圖像數(shù)據(jù)(GB&GR)進(jìn)行壓縮,以便大幅減少計(jì)算量及分析時(shí)間。
(3) SDRAM 控制器:通過(guò)六組FIFO控制器,將SDRAM資源規(guī)劃給兩組CMOS傳感器控制器及VGA控制器來(lái)使用(三寫三讀)。
2. VGA硬件模塊:
(1) VGA 控制器:通過(guò)其器件,可以實(shí)時(shí)將圖像直接顯示在VGA上。
(2) XY Histogram:并通過(guò)XY坐標(biāo)標(biāo)示出目標(biāo)位置,并在實(shí)時(shí)圖像上進(jìn)行X軸及Y共模電感器軸的圖像數(shù)據(jù)統(tǒng)計(jì)(Histog電感器生產(chǎn)廠家ram)。
3. 動(dòng)力控制:
通過(guò)第二顆軟核CPU來(lái)依序執(zhí)行外部給入的命令,CPU通過(guò)四組PIO來(lái)驅(qū)動(dòng)車體前后輪的控制電路,達(dá)到車體前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)的控制。
主要硬件器件
以SOPC Builder完成雙CPU核心的設(shè)定,并利用Verilog設(shè)計(jì)硬件電路器件,以waveform進(jìn)行時(shí)序仿真并驗(yàn)證,再通過(guò)PIO方式和CPU連結(jié)工字電感器,除了SOPC Builder所提供的外圍電路以外尚有雙CMOS 傳感器圖像擷取電路、六端口SDRAM控制器、VGA控制器(含圖像處理電路),說(shuō)明如下,如圖3所示,自行開(kāi)發(fā)的硬件電路已集成為一個(gè)較大的模塊(在圖2左方的方塊),而圖3右方的方塊則是利用SOPC Builder所建立的雙CPU模塊。
圖2 硬件器件
1. 雙核處理器:
在圖3中的cpu_0是用來(lái)控制CMOS 傳感器及圖像處理所用,而cpu_1是用來(lái)控制車控動(dòng)力的深圳電感廠家。

圖3 雙CPU系統(tǒng)
2. 2個(gè) CMOS 傳感器擷取: 大功率電感廠家 |大電流電感工廠
